Der Motor mit der Piezo LEGS Technologie
Piezo LEGS® arbeitet mit Reibungsantrieb, bei dem die Kraft durch die interne Vorspannung der piezokeramischen Aktuatorbeine in direktem Reibungskontakt mit dem Rotor oder der Antriebsstange erzeugt wird. Wenn die Beine zu laufen beginnen, sind sie immer in mechanischem Kontakt mit der Antriebsstange.
- Die Spannung wird sowohl links als auch rechts angelegt, wodurch das Bein auf seine volle Länge gestreckt wird
- Die Spannung wird links angelegt, wodurch das Bein nach rechts gestreckt wird
- Keine Spannung am Bein angelegt
- Die Spannung wird rechts angelegt, wodurch das Bein nach links gestreckt wird

Schritt eins
Das erste Beinpaar bleibt in Kontakt mit der Stange und bewegt sich nach rechts. Das zweite Paar zieht sich zurück. Die Beinenden werden nach links gebogen.

Schritt zwei
Das zweite Paar wird nun gestreckt und positioniert sich neu an der Stange. Die Beinenden bewegen sich nach rechts. Das erste Paar zieht sich zurück und die Beinenden werden nach links gebogen.

Schritt drei
Das zweite Paar bewegt sich nach rechts. Das erste Paar wird gestreckt und bewegt sich nach oben zur Stange.

Schritt vier
Alle vier Beine sind elektrisch aktiviert.

Die Elektronik
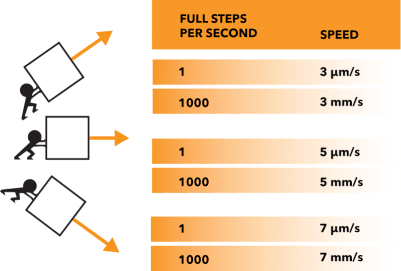
Durch das Anlegen von Spannungssignalen an die Keramik entsteht eine kontrollierte Bewegung. Die Schrittlänge hängt von der Last ab, wie die nachfolgende Abbildung zeigt. Ein voller Schritt kann in mehrere Tausend Mikroschritte unterteilt werden. Die Länge eines Mikroschritts reicht bis in den Subnanometerbereich.
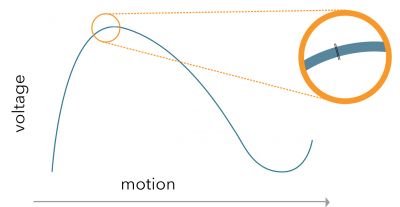
Für hohe Mikroschritt-Auflösung optimierte Wellenform
Ein Mikroschritt = ein Bruchteil der Wellenform (Vollschritt); z. B. 8192 Mikroschritte pro Wellenform.