6,5 N Linearantrieb, nicht-magnetisch und vakuumtauglich
Der LL10D Linearmotor wurde für OEM-Anwendungen mit beengten Platzverhältnissen und dem Schwerpunkt auf präziser Positionierung in magnetischen oder Vakuum-Umgebungen konzipiert
6,5 N Kraft, nicht-magnetisch und vakuumtauglich.
- Echter direkter Linearantrieb
- Vakuumtauglich
- Nicht-magnetisch
- Auflösung bis in den Subnanometerbereich
- 6,5 N Kraft
- 0-74,5 mm Hub
- Selbsthemmend
- Spielfrei
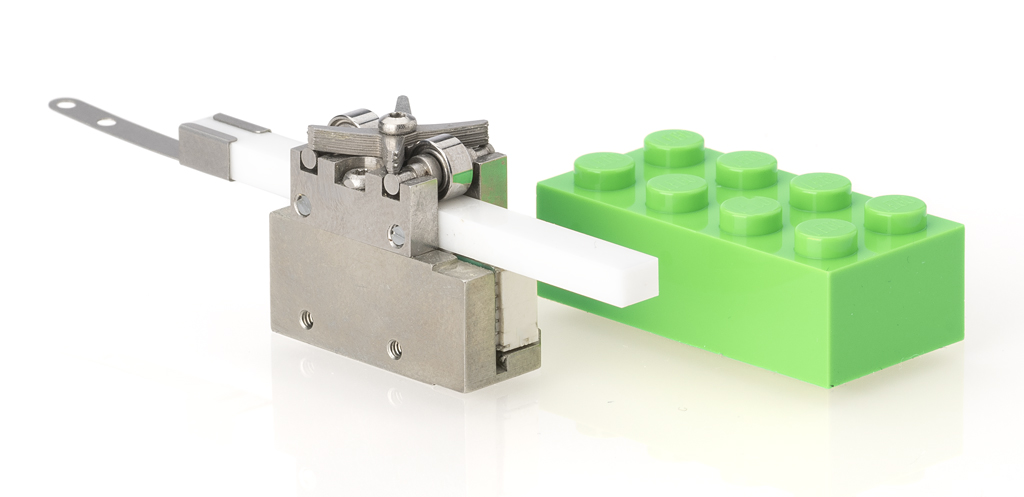
Einführung in den LL10D Piezomotor
Echter direkter Linearantrieb
Der LL10 Linearmotor ist für eine Vielzahl von OEM-Anwendungen mit Schwerpunkt auf präziser Positionierung in Umgebungen vorgesehen, in denen ein vollständig nicht-magnetischer und/oder vakuumtauglicher Motor erforderlich ist.
Das Direktantriebsprinzip der Piezo LEGS sorgt für eine Bewegung ohne mechanisches Spiel oder Umkehrspiel. Submikrometer-Bewegungen werden mit diesem sehr kompakten und starken Motor leicht gemacht. Er ersetzt Schrittmotorbaugruppen, wenn eine bessere Auflösung und eine gleichmäßige lineare Bewegung erforderlich sind.
Vakuumtauglich
Für die Vakuumkompatibilität enthält der Motor passende Komponenten und ist speziell dafür vorbereitet, dass die Ausgasung minimiert wird und der Motor bei Temperaturen bis zu 125 °C ausgehärtet werden kann.
Nicht-magnetisch
Die piezokeramischen Aktuatoren im Kern des Motors sind von Natur aus nicht-magnetisch, und das Motorgehäuse und andere Teile sind aus nicht-magnetischen Legierungen gefertigt. Die magnetische Flussdichte beträgt weniger als 1 nT (Sensorempfindlichkeit bei Referenzmessungen) in einem Abstand von 10 mm zum Motorgehäuse.
Dieser Linearantrieb ist auch in einer vakuumtauglichen 10N-Version mit integriertem Encoder und eingebauter Präzisionsführung erhältlich.
Technische Daten LEGS® LL10D
|
Typ |
Normal (A) |
Einheit |
|
Maximaler Hub
|
74,5
|
mm
|
|
Maximalgeschwindigkeit
Treiberabhängig |
15
|
mm/s
|
|
Minimalgeschwindigkeit
Treiberabhängig |
1
|
μm
|
|
Stillstandskraft
|
6,5
|
N
|
|
Haltekraft
|
>6,5
|
N
|
|
Vakuum
|
Ja
|
|
|
Nicht-magnetisch
|
Ja
|
|
|
Betriebsspannung
|
42-49
|
V
|
|
Leistungsaufnahme
|
5
|
mW/Hz
|
|
Mechanische Größe L x H x T
mit Führungen und Encoder |
k.A.
|
mm
|
|
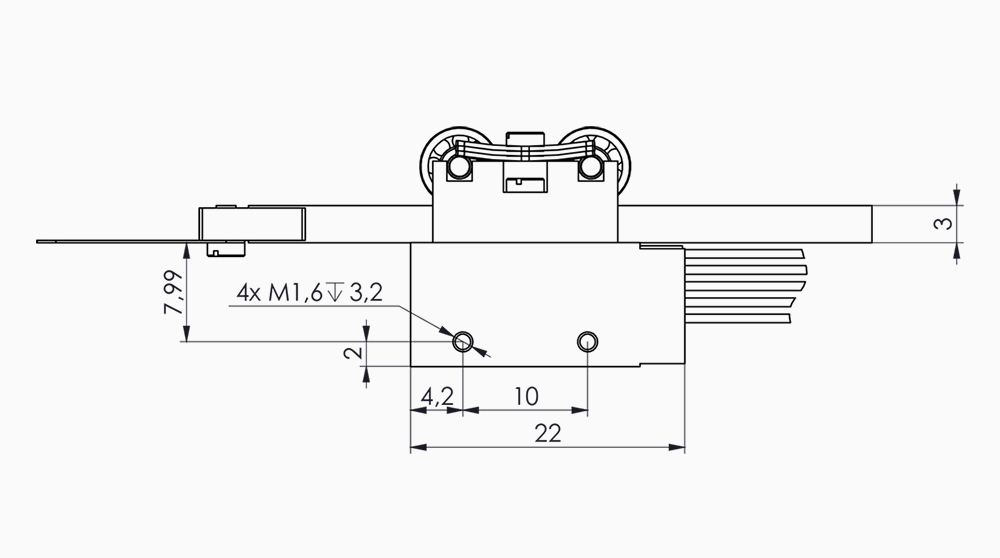
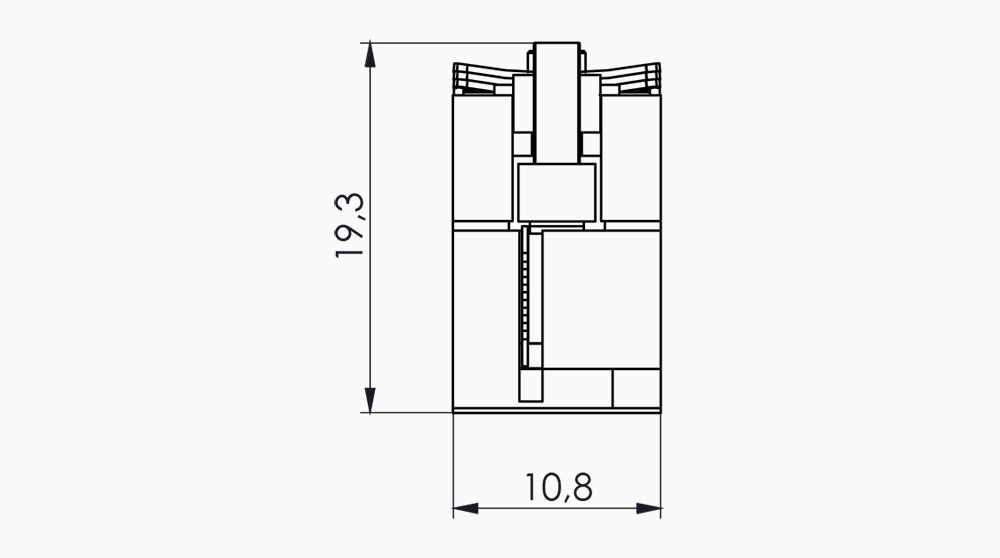
Mechanische Größe L x H x T
ohne Führungen und Encoder |
22 x 19,3 x 10,8
|
mm
|
|
Gewicht
mit 50 mm Antriebsstange |
23
|
g
|
|
Material im Motorgehäuse
|
Arcap
|
|
|
Betriebstemperatur
empfohlen |
-20 bis +70
|
ºC
|
|
Anschluss Motor
|
Verlötetes Kabel mit JST 05SR-3S
|
|
|
Anschluss Encoder
|
k.A.
|
|
|
Motor-Auflösung
|
<1
|
nm
|
|
Integrierter Encoder
|
Ja
|
|
|
Encoder-Auflösung
|
k.A.
|
nm
|
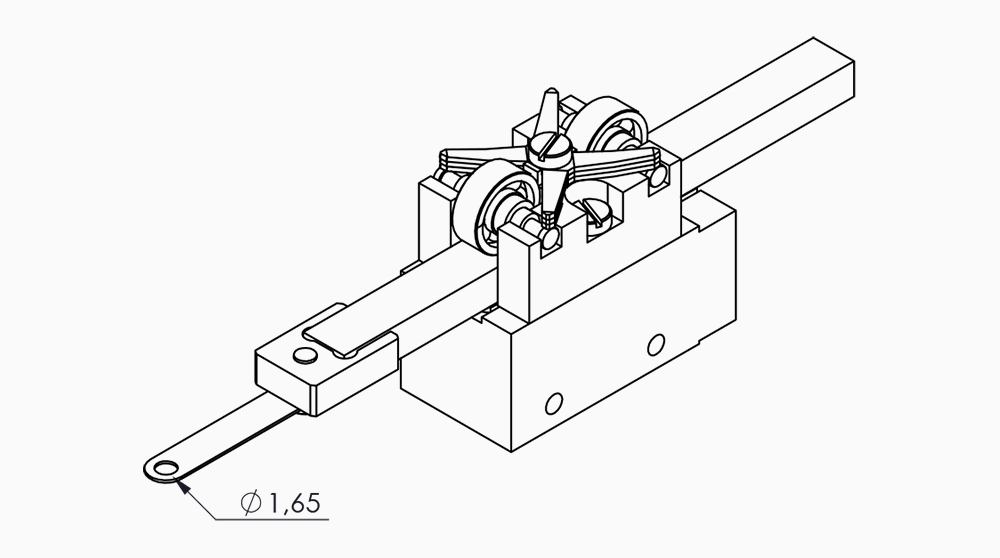
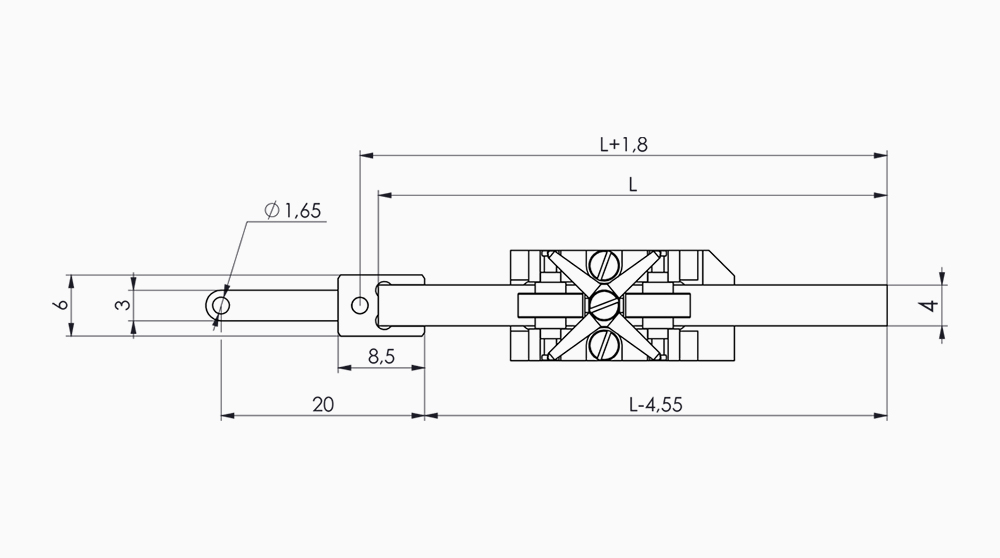
Abmessungen des LEGS® LL10D
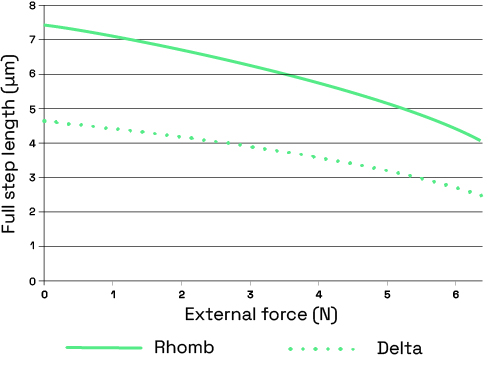
Motorleistung
Motorleistung mit Rhombus-Wellenform (gefüllt) und Delta-Wellenform (gepunktet). Die Vollschrittlänge ist die durchschnittliche Strecke, die die Antriebsstange zurücklegt, wenn die Beine einen vollen Schritt ausführen (d. h. für einen Wellenformzyklus).
Hinweis: Eine Standardabweichung σ von 0,5 μm sollte berücksichtigt werden. Es sind typische Werte für 20 ºC angegeben.
Hubbereich
|
Hub (mm) mit einem Adapter
|
Länge der Antriebsstange (mm)
|
|
0-3,4
|
30
|
|
0-13,4 |
40
|
|
0-23,4 |
50
|
|
0-33,4 |
60
|
|
0-43,4 |
40
|
|
0-74,5 |
101
|
Motordrehzahl bei 20 ºC (fehlt)
|
Wellenform
|
Max. Frequ. (Hz)
|
Geschwindigkeitsbereich (mm/s)
|
|
Rhombus
|
3000
|
0-15
|
|
Delta |
3000
|
0-24
|

Steuerung des Motors
Unsere Motorsteuerungen gibt es in vielen verschiedenen Ausführungen, mit Controllern und Verstärkern für den Laboreinsatz sowie zur Integration in OEM-Geräte.
Wir können auch die Treiber für Kunden lizenzieren, die ihre eigene Treiberelektronik bauen wollen.
LL10D LEGS® Piezo-Motor-Startset
Startsets sind für den LL10D in verschiedenen Konfigurationen verfügbar. Startsets sind nur für Testzwecke mit einer maximalen Anzahl von 3 Sets/Kunde erhältlich. Sie zahlen nur für den Motor.