Piezo LEGS® Rotationsmotor, mit Direktantrieb und einem Ausgangsdrehmoment von 30 mNm.
Dies ist unser kleinster Piezo LEGS® Rotationsmotor, mit Direktantrieb und einem Ausgangsdrehmoment von 30 mNm.
Piezo-Rotationsmotor mit integriertem Encoder
- Rotierender Direktantrieb
- Integrierter Encoder
- 30 mNm Ausgangsdrehmoment
- Selbsthemmend
- Spielfrei
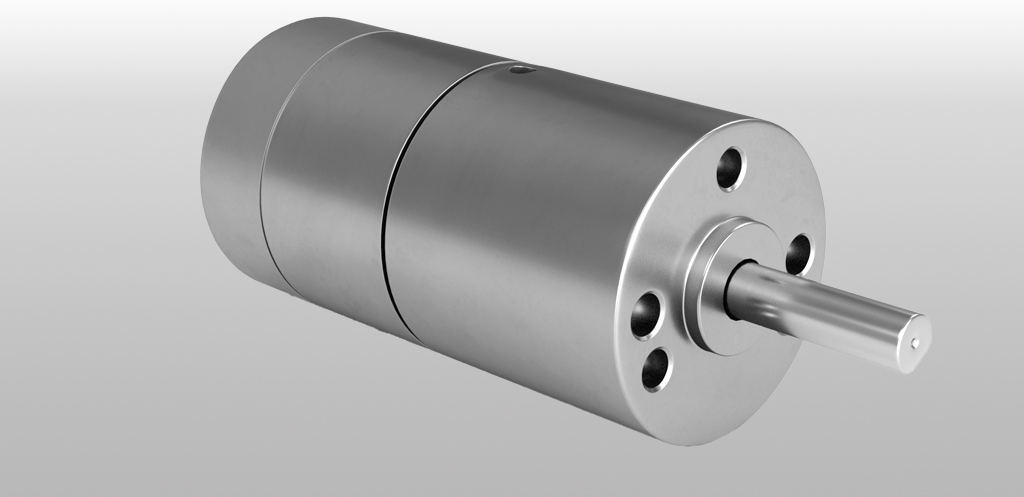
Piezo LEGS® LR17 Rotationsmotor
Dies ist unser kleinster Piezo LEGS® Rotationsmotor, mit Direktantrieb und einem Ausgangsdrehmoment von 30 mNm.
Der LR17 bietet eine Auflösung von 0,2 mrad (0,01°) im geschlossenen Regelkreis, während die Auflösung im offenen Regelkreis im Submikroradiantbereich liegt. In die Konstruktion integriert ist eine Sicherheitssperre mit voller Kraft beim Abschalten.
Nicht für Vakuumumgebungen oder magnetische Umgebungen konzipiert
Technische Daten LEGS® LR17
|
Größe
|
Standard (A)
|
Einheit
|
|
Durchmesser
|
17
|
mm
|
|
Winkelbereich
|
360
|
°
|
|
Geschwindigkeitsbereich |
0-0-265 (0-44 U/min)
|
°/s
|
|
Schrittwinkel, Vollschritt
bei Delta, keine Last, 20 °C |
1000
|
µrad
|
|
Motor-Auflösung
14 Bit, 8192 Mikroschritte |
<1
|
µrad
|
|
Integrierter Encoder
|
Ja
|
|
|
Encoder-Typ
|
Magnetisch, absolut
|
|
|
Encoder-Genauigkeit
|
2,0
|
mrad
|
|
Encoder-Auflösung
|
0,2
|
mrad
|
|
Stillstandsmoment
|
0-15
|
mNm
|
|
Haltemoment
|
>30
|
mNm
|
|
Empfohlener Betriebsbereich
|
0-15
|
mNm
|
|
Vakuum
|
Nein
|
|
|
Betriebsspannung
|
42-48
|
V
|
|
Leistungsaufnahme
|
3,5
|
mW/Hz
|
|
Max. Wellenlast
radial, 6,5 mm von der Montagefläche |
1
|
N
|
|
Max. Wellenlast
axial |
2
|
N
|
|
Max. Einpresskraft der Welle
|
5
|
N
|
|
Mechanische Größe L x H x T
|
TBA – Information folgt
|
mm
|
|
Gewicht
|
30
|
g
|
|
Anschluss Motor
|
CviLux CI1116M-2VD0
|
|
|
Material im Motorgehäuse
|
Aluminium, Edelstahl
|
|
|
Betriebstemperatur
|
-20 bis +70
|
ºC
|
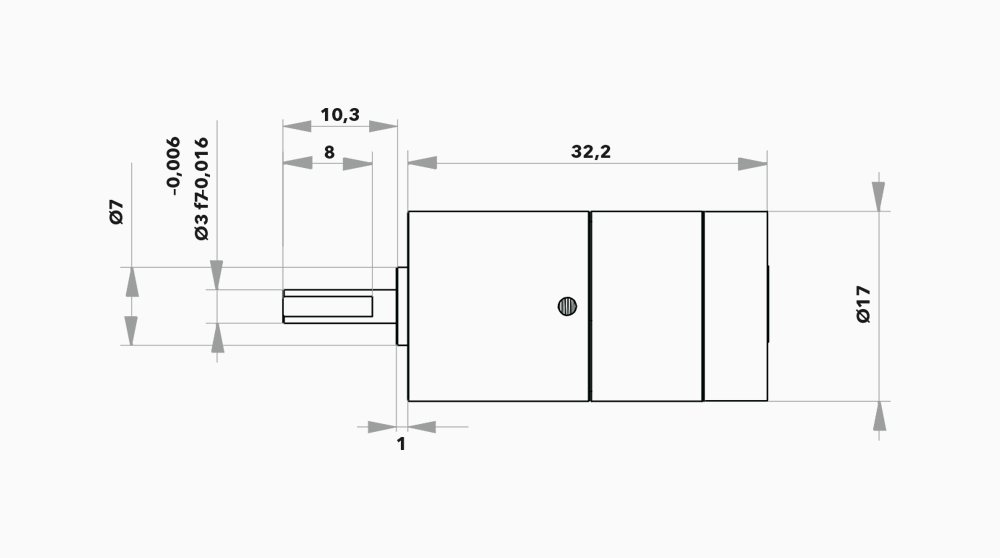
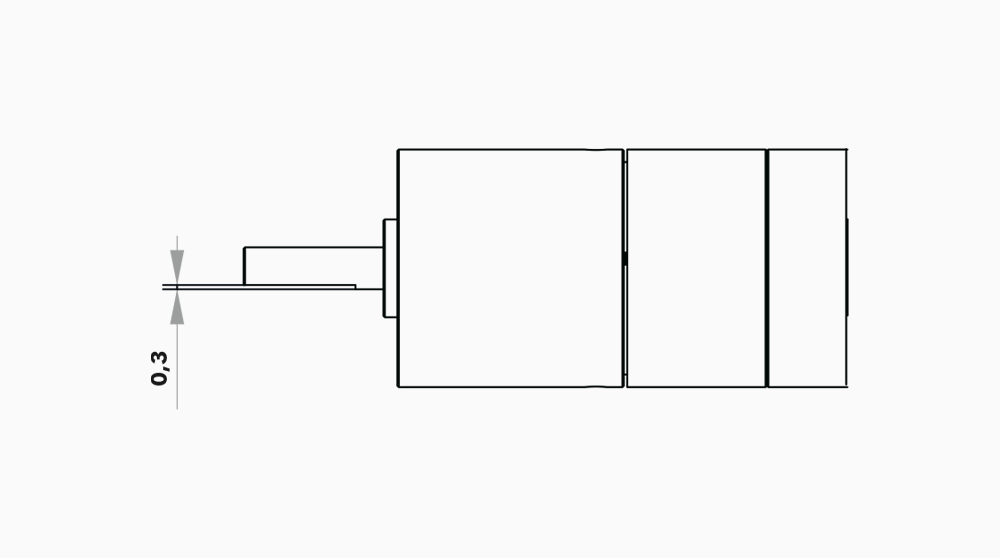
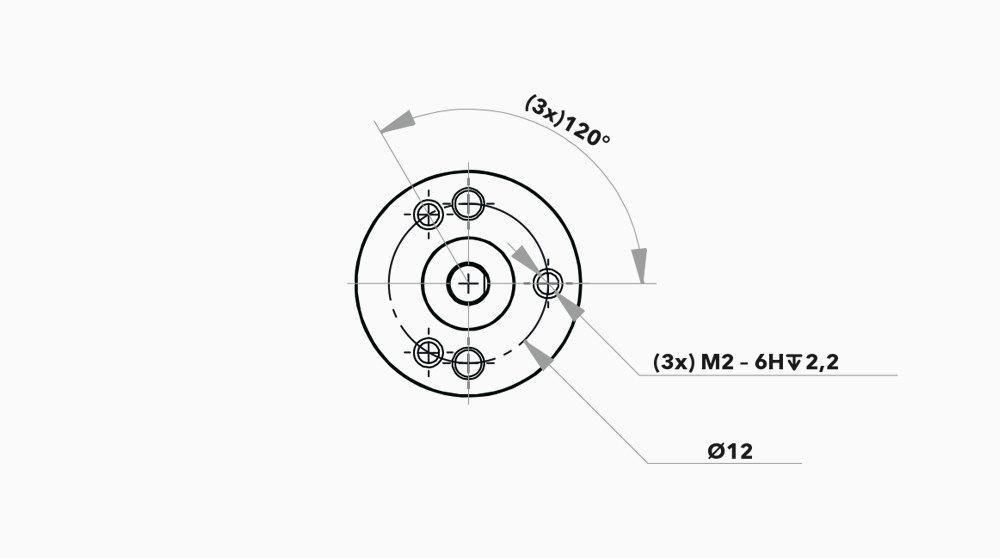
Hauptabmessungen LR17
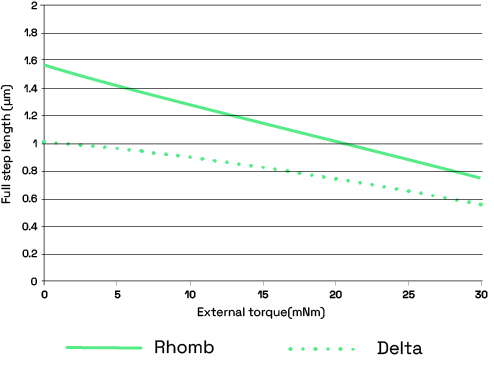
Motorleistung LR17
Motorleistung mit Rhombus-Wellenform (gefüllt) und Delta-Wellenform (gepunktet). Die Vollschrittlänge ist die durchschnittliche Strecke, die die Antriebsstange zurücklegt, wenn die Beine einen vollen Schritt ausführen (d. h. für einen Wellenformzyklus).
Hinweis: Eine Standardabweichung σ von 0,5 μm sollte berücksichtigt werden.
Es sind typische Werte für 20 ºC angegeben.
Motordrehzahl bei 20 °C ohne Last
|
Wellenform
|
Max. Frequ. (Hz)
|
Geschwindigkeitsbereich (mm/s)
|
|
Delta
|
3000
|
0–28 U/min (0–170°/s)
|
|
Rhombus |
0–44 U/min (0–265°/s)
|
Information zum LR17 Encoder
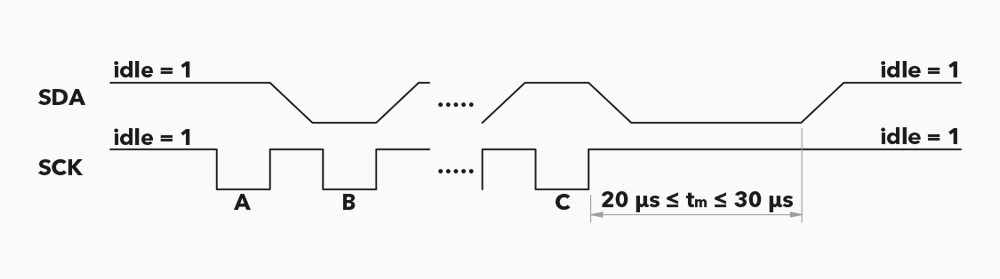
Der LR17 verfügt über einen integrierten magnetischen Absolutencoder. Dieser liefert 15-Bit-SSI-Daten. SCK (Sensor Clock) und SDA (Sensor Data) sind normalerweise auf hohem Niveau (Leerlauf). Wenn der LR17 einen Taktimpuls vom Controller empfängt, antwortet er mit Positionsdaten. Die SCK-Frequenz sollte 70–180 kHz betragen. Die Daten sollten kurz vor der positiven Flanke gelesen werden.
Die Zeit zwischen positiven Flanken beträgt 20–30 µs. Die Ausgabedaten bestehen aus 15 Bits (msb zuerst), gefolgt von einem Stoppbit. Wenn SCK über das Stoppbit hinausgeht, folgt ein zweites Stoppbit, gefolgt von wiederholten 15-Bit-Daten und einem Stoppbit. Nach dem Auslesen der Position werden mindestens 120 µs benötigt, um sicherzustellen, dass die Positionsdaten aufgefrischt werden. Das Lesen der Position alle 0,5 ms ist die maximal empfohlene Rate für den Dauerbetrieb.
A – 1. Taktimpuls, SDA bleibt im Leerlauf bis zur positiven Flanke.
B – 2. Taktimpuls, die SDA-Ausgabe ist bit1 (msb).
C – 3. Taktimpuls, die SDA-Ausgabe ist bit15 (lsb).

Steuerung des Motors
Unsere Motorsteuerungen gibt es in vielen verschiedenen Ausführungen, mit Controllern und Verstärkern für den Laboreinsatz sowie zur Integration in OEM-Geräte.
Wir können auch die Treiber für Kunden lizenzieren, die ihre eigene Treiberelektronik bauen wollen.

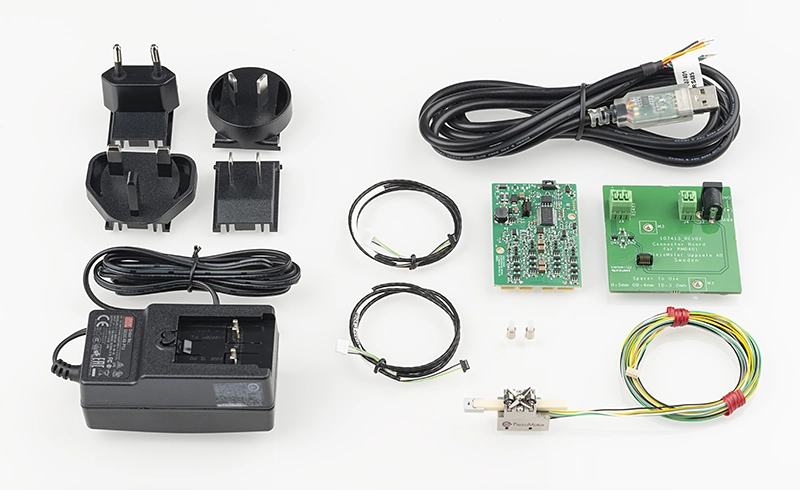
LR17 LEGS® Piezomotor-Startset
Startsets sind für den LR17 verfügbar. Startsets sind nur für Testzwecke mit einer maximalen Anzahl von 3 Sets/Kunde erhältlich. Sie zahlen nur für den Motor.