Piezo LEGS® Rotationsmotor, für Vakuumumgebungen und magnetische Umgebungen konzipiert
Version mit 50 mNm Ausgangsdrehmoment für magnetische und/oder Vakuum-Umgebungen. Die nicht-magnetische Version ist mit einem integrierten Encoder oder mit einer verlängerten Welle für die kundenspezifische Encoder-Anpassung erhältlich.

Piezo-Rotationsmotor mit integriertem Encoder und 50 mN Ausgangsdrehmoment
- Rotierender Direktantrieb
- Integrierter Encoder
- 50 mNm Ausgangsdrehmoment
- Vakuumtauglich
- Nicht-magnetisch
- Selbsthemmend
- Spielfrei
Rotierender LEGS® Piezo-Konzeptmotor für Vakuumumgebungen und magnetische Umgebungen
Dies ist unser Piezo LEGS® Rotationsmotor, mit Direktantrieb und einem Ausgangsdrehmoment von 50 mNm. Der LR23-50 bietet eine Auflösung von 0,2 mrad (0,01°) im geschlossenen Regelkreis, während die Auflösung im offenen Regelkreis im Submikroradiantbereich liegt. In die Konstruktion integriert ist eine Sicherheitssperre mit voller Kraft beim Abschalten. Für Vakuumumgebungen und magnetische Umgebungen konzipiert.
LR23-50 mNm Produktportfolio
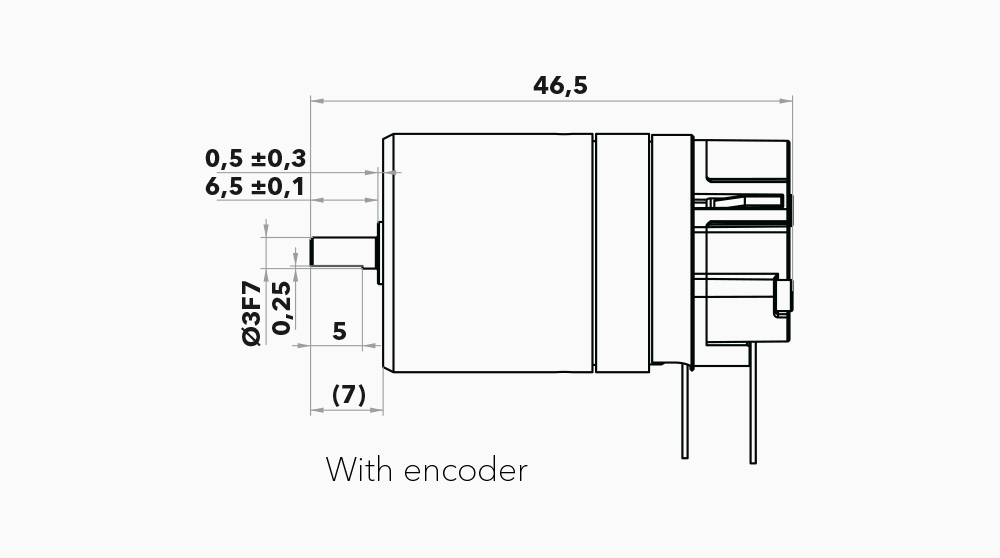
- mit Encoder
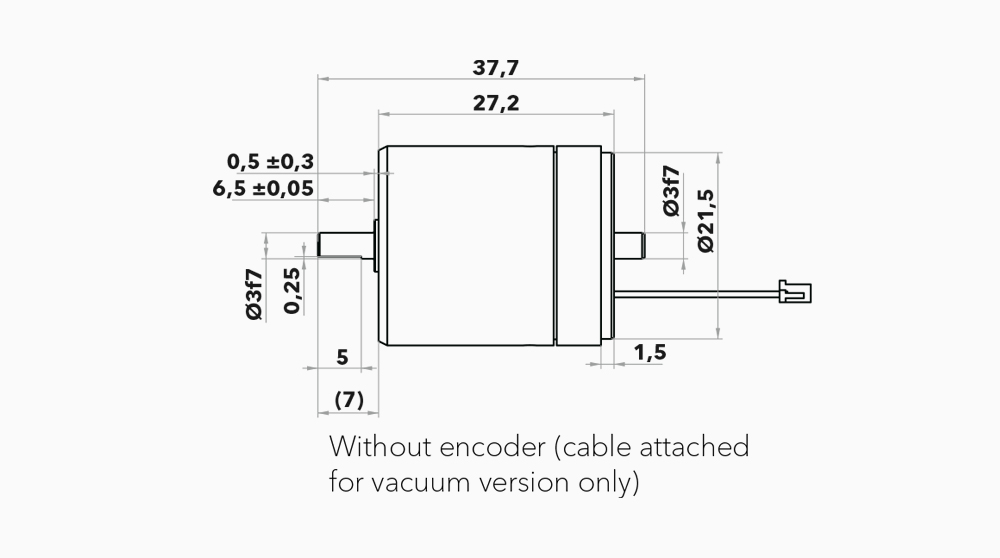
- ohne Encoder
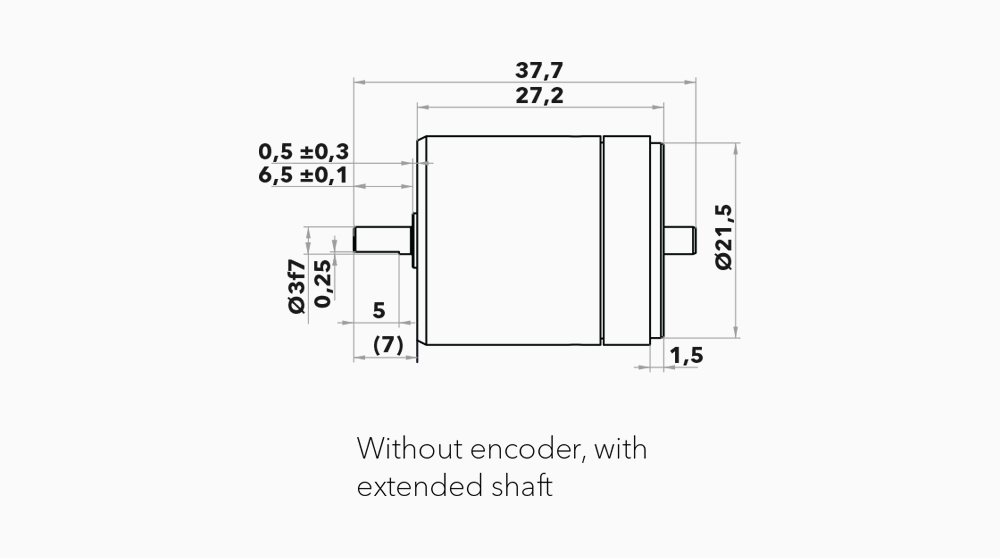
- ohne Encoder und mit verlängerter Welle
Technische Daten LEGS® LT23-50
|
Größe
|
Nicht-magnetisch (C)
|
Nicht-magnetisch (C), verl. Welle
|
Nicht-magnetisch (C), Encoder
|
Nicht-magnetisch Vakuum (D)
|
Nicht-magnetisch Vakuum (D), verl. Welle
|
Einheit
|
| Durchmesser | 23 |
mm
|
||||
|
Winkelbereich
|
360
|
°
|
||||
|
Geschwindigkeitsbereich |
0-160 (0-27 U/min)
|
°/s
|
||||
|
Schrittwinkel, Vollschritt
@ Delta, keine Last, 20 °C |
550
|
µrad
|
||||
|
Motor-Auflösung
14 Bit, 8192 Mikroschritte |
<1
|
µrad
|
||||
|
Integrierter Encoder
|
Nein
|
Nein
|
Ja
|
Nein
|
Nein
|
|
|
Encoder-Typ
|
k.A.
|
k.A.
|
Optischer Quadratur-Encoder
|
k.A.
|
k.A.
|
|
|
Encoder-Auflösung
|
k.A.
|
k.A.
|
0,4
|
k.A.
|
k.A.
|
mrad
|
|
Stillstandsmoment
|
|
|
50
|
|
|
mNm
|
|
Haltemoment
|
|
|
>50
|
|
|
mNm
|
|
Empfohlener Betriebsbereich
|
|
|
0-25
|
|
|
mNm
|
|
Vakuum
|
Nein
|
Nein
|
Nein
|
10-7
|
10-7
|
torr
|
|
Betriebsspannung
|
|
|
42-48
|
|
|
V
|
|
Leistungsaufnahme
|
|
|
7
|
|
|
mW/Hz
|
|
Max. Wellenlast
radial, 6,5 mm von der Montagefläche |
|
|
5
|
|
|
N
|
|
Max. Wellenlast
axial |
|
|
2
|
|
|
N
|
|
Max. Einpresskraft der Welle
|
|
|
5
|
|
|
N
|
|
Mechanische Größe L x H x T
|
|
|
? x ?
|
|
|
mm
|
|
Gewicht
|
65
|
68
|
80
|
65
|
70
|
g
|
|
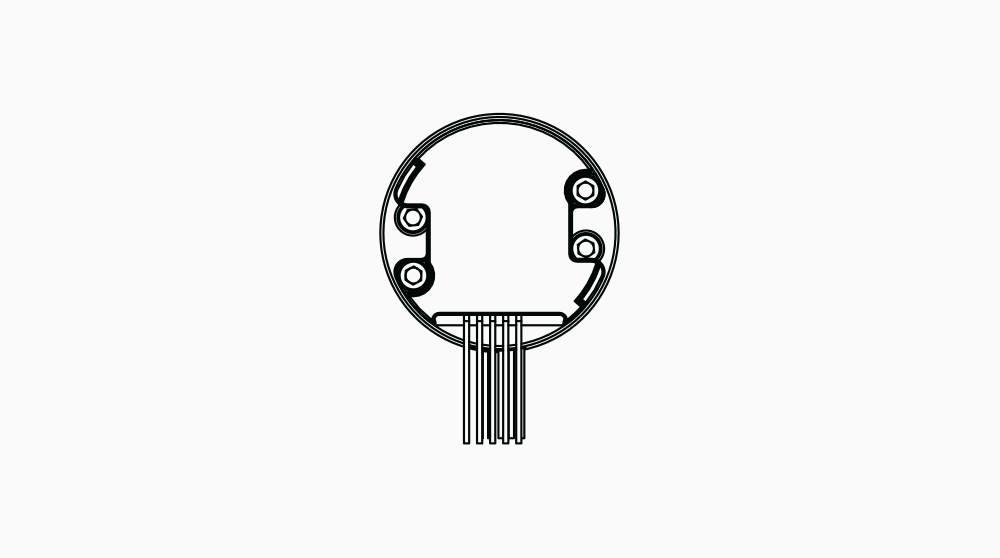
Anschluss Motor
|
JST BM05BSRSS-TB
|
JST BM05BSRSS-TB
|
Kabel angeschlossen,
treiberabhängig |
Verlötetes Kabel m. JST
05SR-3S |
Verlötetes Kabel m. JST
05SR-3S |
|
|
Material im Motorgehäuse
|
Nicht-magnetisch
|
|
||||
|
Betriebstemperatur
|
-20 bis +70
|
ºC
|
||||
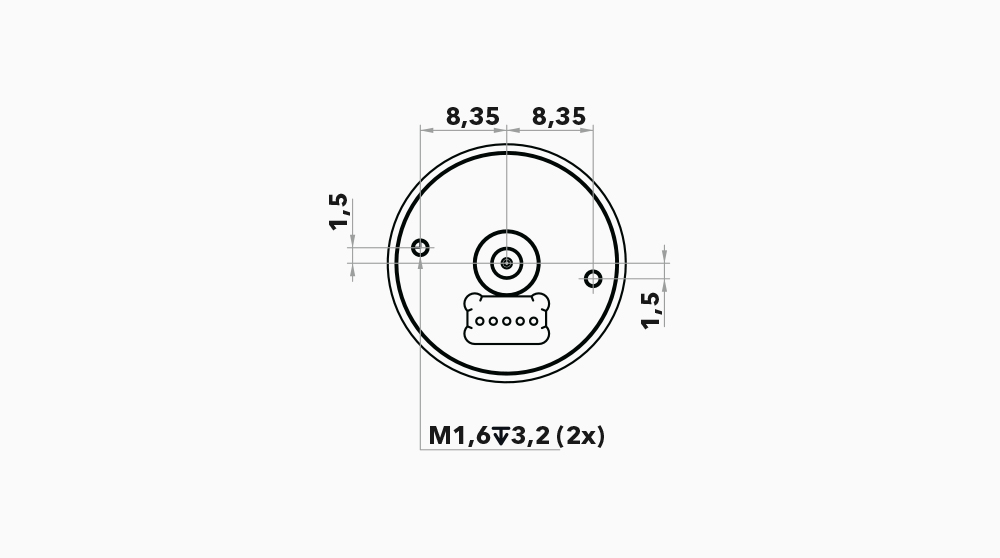
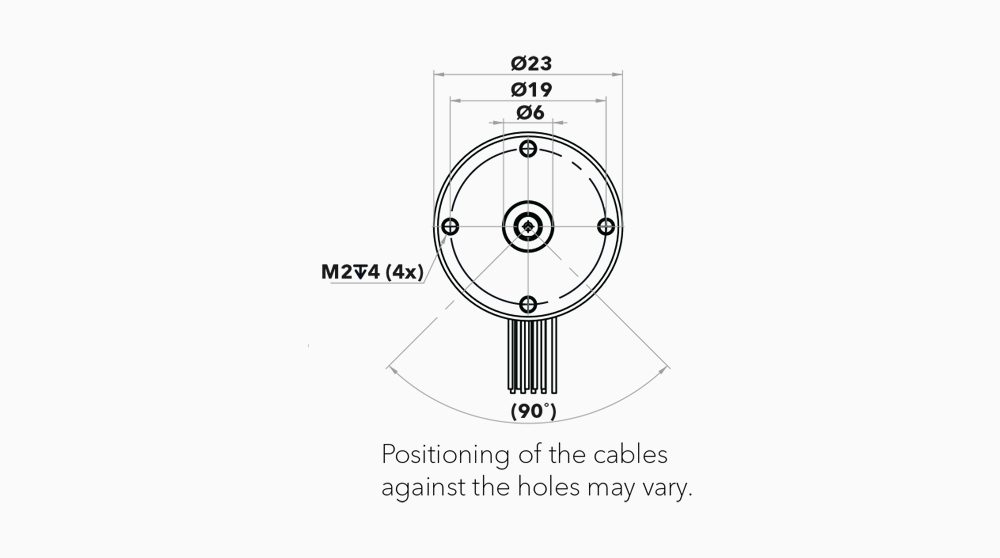
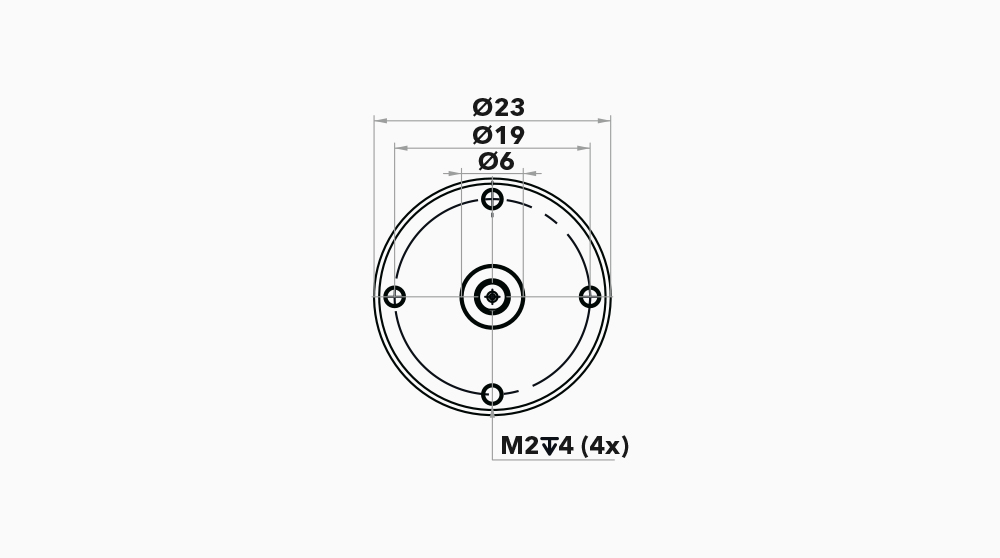
Hauptabmessungen LR23-50
Motorleistung
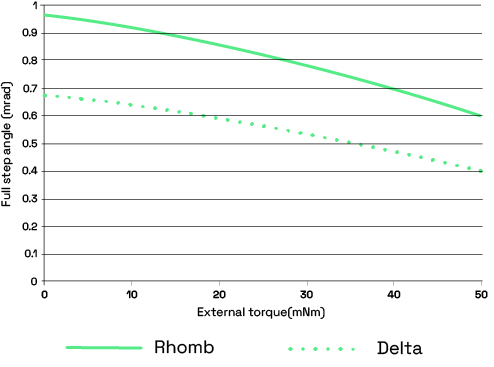
Motorleistung mit Rhombus-Wellenform (gefüllt) und Delta-Wellenform (gepunktet). Die Vollschrittlänge ist die durchschnittliche Strecke, die die Antriebsstange zurücklegt, wenn die Beine einen vollen Schritt ausführen (d. h. für einen Wellenformzyklus).
Hinweis: Eine Standardabweichung σ von 0,5 μm sollte berücksichtigt werden.
Es sind typische Werte für 20 ºC angegeben.
Motordrehzahl bei 20 °C ohne Last
|
Wellenform
|
Max. Frequ. (Hz)
|
Geschwindigkeitsbereich (mm/s)
|
|
Delta
|
3000
|
0–19 U/min (0–114°/s)
|
|
Rhombus |
0–27 U/min (0–160°/s)
|

Steuerung des Motors
Unsere Motorsteuerungen gibt es in vielen verschiedenen Ausführungen, mit Controllern und Verstärkern für den Laboreinsatz sowie zur Integration in OEM-Geräte.
Wir können auch die Treiber für Kunden lizenzieren, die ihre eigene Treiberelektronik bauen wollen.
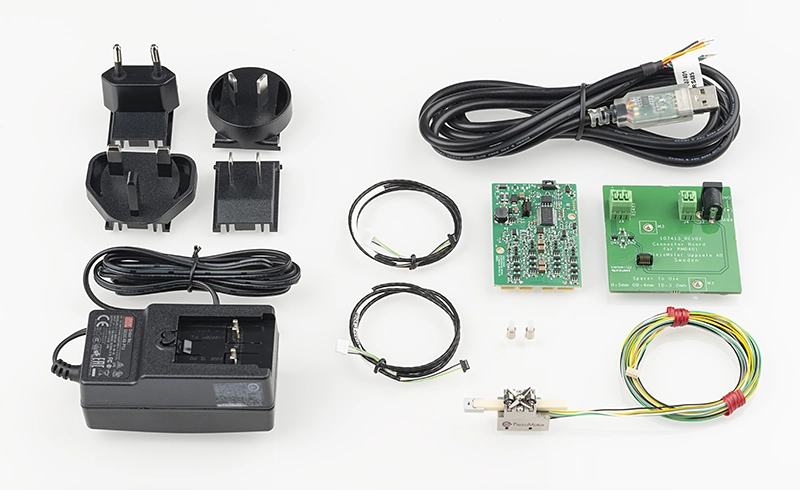
LR23-50 LEGS® Piezomotor-Startset
Startsets sind für den LTC450 verfügbar. Startsets sind nur für Testzwecke mit einer maximalen Anzahl von 3 Sets/Kunde erhältlich. Sie zahlen nur für den Motor.