Steuerung des Motors
Unsere Motorsteuerungen gibt es in vielen verschiedenen Ausführungen, mit Controllern und Verstärkern für den Laboreinsatz sowie zur Integration in OEM-Geräte.
Wir können auch die Treiber für Kunden lizenzieren, die ihre eigene Treiberelektronik bauen wollen.
Geschlossener oder offener Regelkreis mit Subnanometer-Auflösung
- 8192 Mikroschritte
- Mehrachsensteuerung
- Stackingfähig
- Einfache Integration
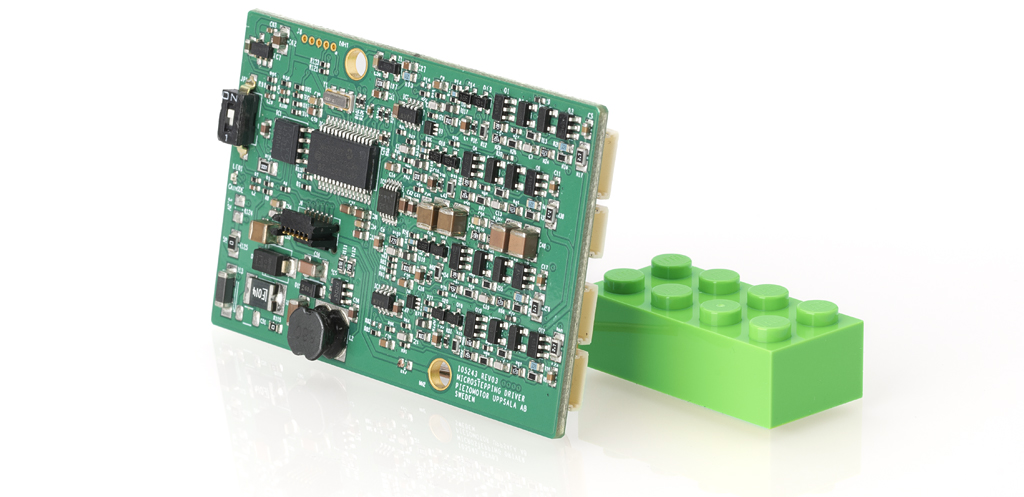
Piezo LEGS® Controller PMD401
Der PMD401 Controller ist hauptsächlich für den Einsatz mit unseren Piezo-Standardmotoren ab 40 N und unseren Piezo-Rotationsmotoren vorgesehen.
Der PMD401 ist ein voll ausgestatteter Miniatur-Controller für den Betrieb mit offenem und geschlossenem Regelkreis, der leicht zu einem Mehrachsen-Steuerungssystem zusammengesetzt werden kann. Er kann zur Integration in OEM-Anwendungen an das Mainboard des Kunden angeschlossen werden. Die Host-Kommunikation erfolgt über 2-Leiter-RS485 mittels ASCII-Befehlen.
Der PMD401 kann auch als Servoverstärker verwendet werden, bei dem der externe Controller die Geschwindigkeit über eine SPI-Schnittstelle regelt. Optional wird ein Breakout-Board mit Klemmenblöcken für einfachen Zugang zu Strom und Kommunikation für Kunden angeboten, die sofort mit der Anwendungsentwicklung beginnen möchten. Er bietet eine Subnanometer-Auflösung und eine Geschwindigkeit im mm/s-Bereich.
Technische Daten PMD401
|
Typ |
Wert |
Hinweis |
|
Anzahl der Achsen |
1 |
|
|
Unterstützung für mehrere Achsen |
Ja |
Für die Mehrachssteuerung können Geräte über RS485 gekoppelt werden |
|
Echte Geschwindigkeitsregelung |
Nein |
Nur schrittfrequenzgesteuert |
|
Auflösung |
8192 Mikroschritte |
Jeder volle Schritt von etwa 5 µm wird in 8192 Schritte unterteilt |
|
Maximale Schrittfrequenz |
1500 |
Abhängig vom Motor |
|
Unterstützte Encoder |
Quadratur |
ABZ, 20 MHz zählend |
|
SSI |
SSI 8–30 Bit, 330 oder 130 kbps |
|
|
BiSS |
18/26/32 Bit, 330 kbps |
|
|
Analog |
Analoge Schnittstelle ±10 V (12 Bit, 5 kHz) |
|
|
Host-Kommunikation |
Zwei-Leiter-RS485 |
Befehle werden im ASCII-Format mit 115,2 kbps (n81) gesendet. |
|
Servoschnittstelle |
SPI |
16 Bit (signiert), maximal 15 Mbps |
|
Allgemeine E/A |
4 Eingänge |
Je nach Art des Encoders und Verwendung von Endschaltern |
|
3 Ausgänge |
||
|
Stackingfähiger Steckverbinder |
6-polig, ERNI MicroStac 114711 |
GND, 48 V, RS485 |
|
Motoranschluss |
5-polig, JST SM05B-SRSS-TB |
Zwei Steckverbinder, Parallelverbindung |
|
Encoder-/Servo-Steckverbinder |
6-polig, JST SM06B-SRSS-TB |
Eingang für Sensoren oder SPI-Servoschnittstelle |
|
Endschalter |
Ja |
Eingang für externe Endschalter |
|
Kommunikations-Steckverbinder |
3-polig, JST SM03B-SRSS-TB |
Eingang für RS485 oder Verwendung des stackingfähigen Steckverbinders |
|
Stromanschluss |
2-polig, JST SM02B-SRSS-TB |
Eingang für 48-V-Versorgung oder Verwendung des stackingfähigen Steckverbinders |
|
Netzteil |
48 V Gleichstrom, 5 W |
48 V Gleichstrom ±5% |
|
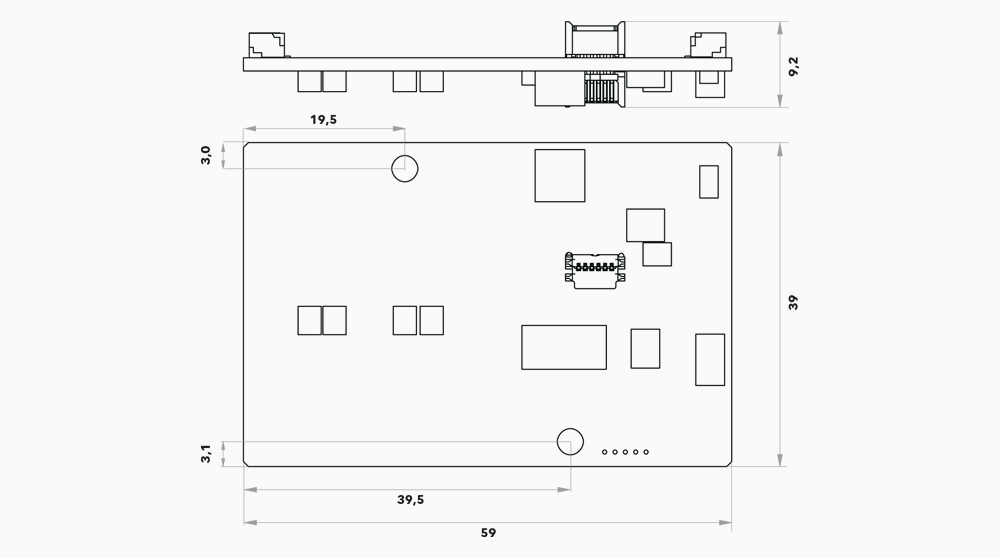
Abmessungen |
59 x 39 x 9,2 |
mm |
Abmessungen des PMD401