Wir stellen Mikrotiterplatten-Roboter für medizinische und wissenschaftliche Instrumente her.
Wir helfen Erstausrüstern (OEMs), sich mit der besten Technologie und den niedrigsten Kosten gegen die Konkurrenz durchzusetzen.
Unsere Mikrotiterplatten-Roboter sind voll ausgestattete XYZ-Bewegungssysteme zum Bewegen von Mikrotiterplatten, Objektträgern oder anderen Nutzlasten in Ihrem Gerät. Jeder Roboter ist hochintegriert und in der Größe optimiert, wodurch selbst kompakteste Instrumente möglich werden. Wir führen Standarddesigns, können aber auch angepasste Lösungen für Ihre Designspezifikationen anbieten, die Ihre Leistungsanforderungen erfüllen.
Unten finden Sie unser hochentwickeltes Basismodell, das heute in vielen Desktop-Life-Science-Instrumenten verwendet wird.
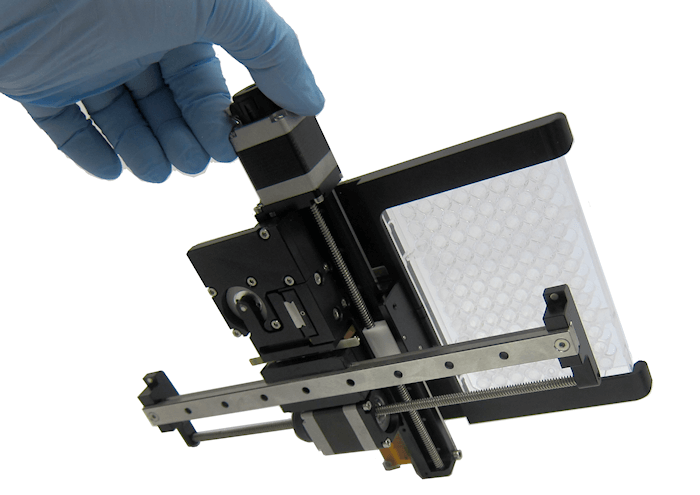
Hochpräziser spindelgetriebener Mikrotiterplatten-Handler
Performance
Unser Roboter kann eine Mikrotiterplatte vorsichtig bewegen und jede Mulde präzise unter Ihrer Flüssigkeitsdosierspitze oder optischen Linse positionieren. Durch die präzise Bewegung in die Mitte jeder Mulde wird das Risiko einer muldenübergreifenden Kontamination ausgeschlossen.
Die besondere Konstruktion macht es außerdem möglich, jede Muldenposition zu erreichen und gleichzeitig nur denkbar wenig Platz im Instrument zu benötigen.
Standfläche
|
Von Seite zu Seite
|
215 mm
|
8,5 Zoll
|
|
Von vorne bis hinten |
250 mm
|
9,8 Zoll
|
|
Höhe |
75 mm
|
2,9 Zoll
|
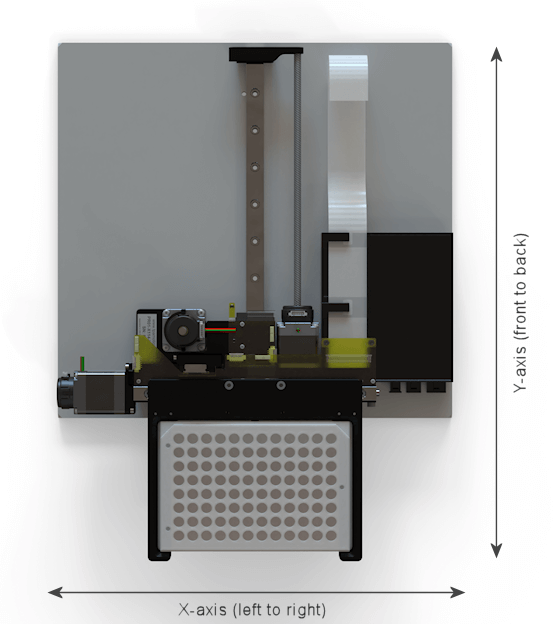
Verfahrweg oder Hub
|
X-Achse
|
118 mm
|
4,6 Zoll
|
|
Y-Achse |
168 mm
|
6,6 Zoll
|
|
Z-Achse |
75 mm
|
1,4 Zoll
|
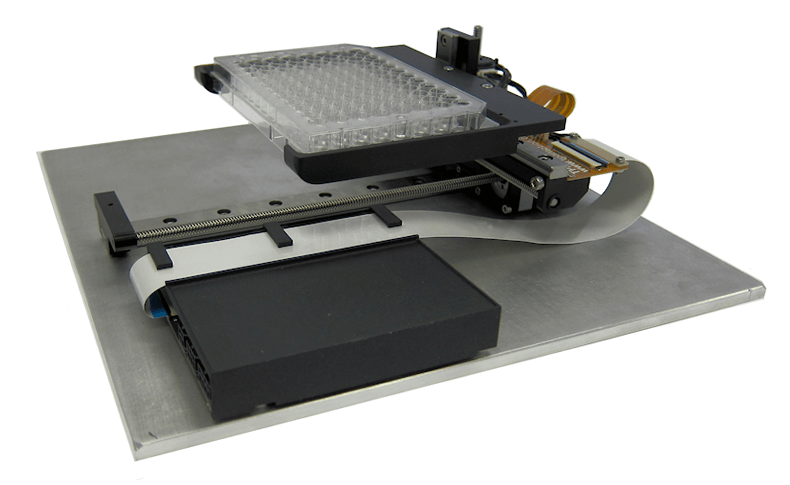
Die Abbildungen zeigen den XYZ-Mikrotiterplatten-Roboter mit auf der Grundplatte montierter Antriebs- und Steuerplatine.
Die Nutzlastkapazität beträgt 250 g (ca. 0,5 lbs).
Motoren und Encoder
Der Roboter verwendet zum Antrieb der Achsen Gewindespindeln mit 28-mm-Schrittmotoren (d. h. Nema 11). Jeder Schrittmotor enthält einen 800-Leitungs-Quadratur-Encoder. Die Gewindespindeln haben eine Steigung von 2,54 mm (d. h. Verfahrweg pro Umdrehung). Diese Kombination ermöglicht eine sehr genaue Positionierung.
Downloads
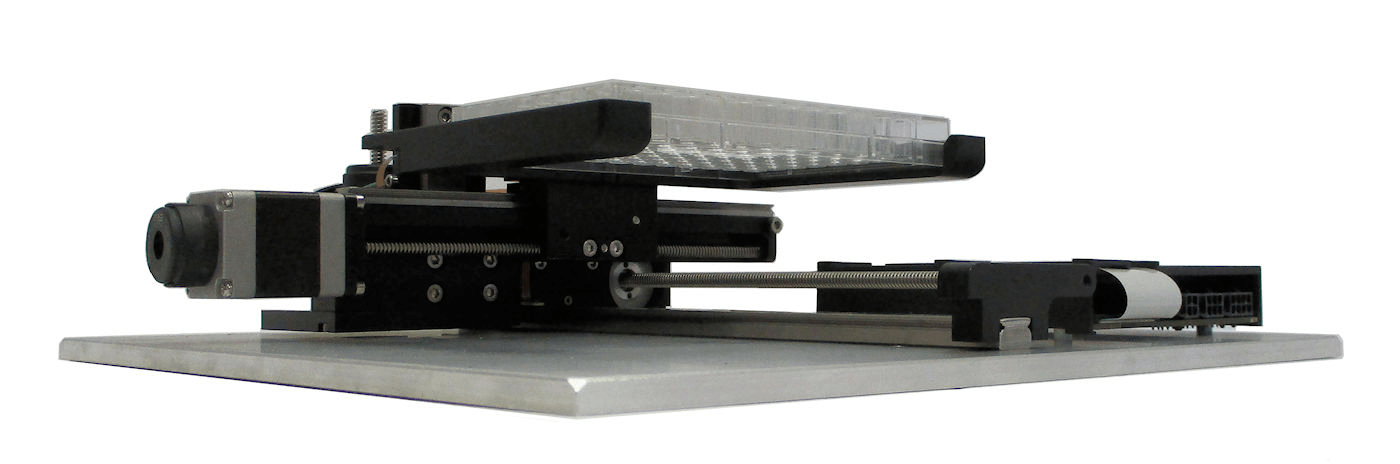
Kompakte Baugruppe
Miniatur-Linearführungen bieten die strukturelle Unterstützung und ermöglichen nahezu reibungslose Bewegung entlang jeder Achse.
Motoren mit Gewindespindel sorgen für den Antrieb.
Dies sind nur einige der Merkmale, die es uns ermöglichen, ein sehr kompaktes Design zu erschaffen.
Sehr geringe Profilhöhe – etwa 75 mm (2,9 Zoll)
Einfache Robotermontage
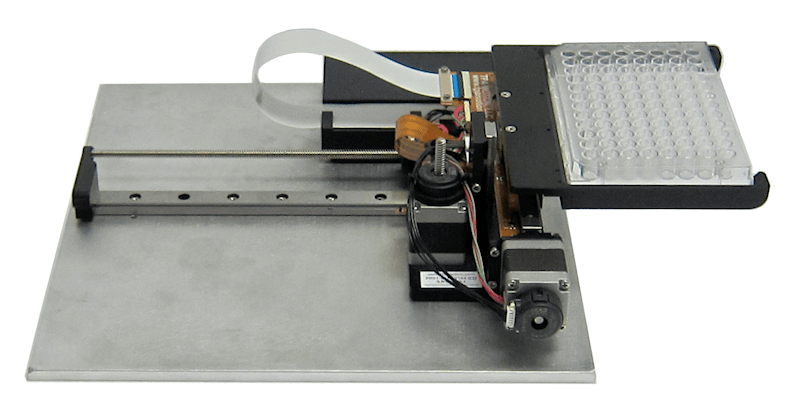
Die Installation ist sehr einfach. Es gibt acht Löcher (siehe Foto) in der Linearführungsschiene zur Befestigung an Ihrer Instrumentenbasis. In den meisten Fällen können zwei beliebige der acht Löcher entlang der unteren Linearführungsschiene für die Montage verwendet werden.
Jedes Loch hat einen Abstand von 25 mm und ist für M3 x 6 Innensechskantschrauben ausgelegt.
Referenzposition
Alles wird auf die Linearführung zurückreferenziert, sodass es nur wichtig ist, diese Komponente richtig an Ihrer Basis oder Struktur auszurichten.
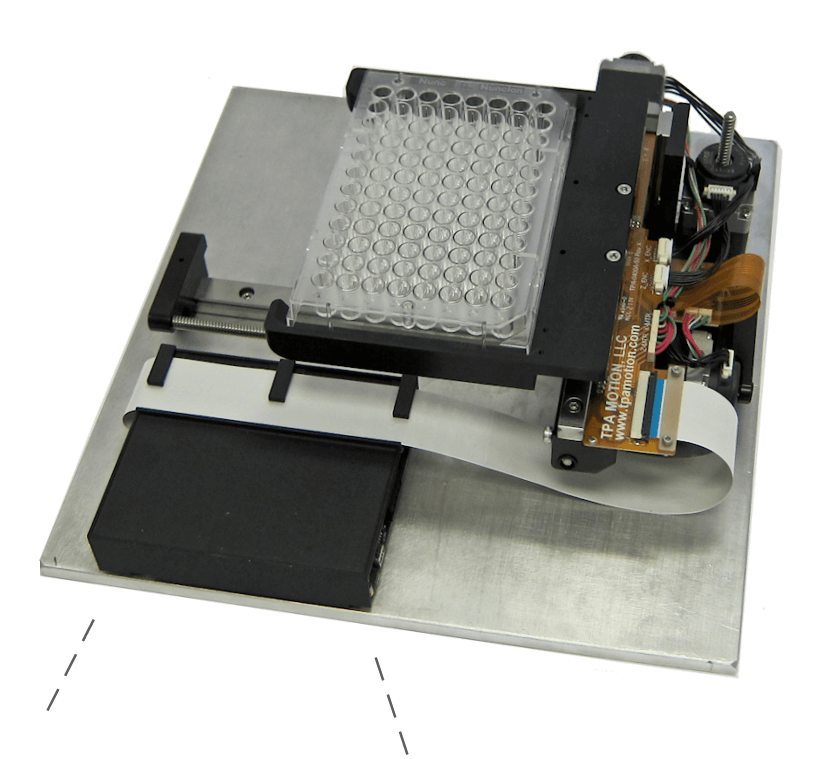
Kompakte Antriebs- und Steuereinheit
Passt perfekt in die Roboter-Standfläche.
Jeder Mikrotiterplatten-Roboter ist mit einer kompakten Antriebs- und Steuereinheit ausgestattet, die auf einer einzigen Leiterplatte untergebracht ist. Die Leiterplatte wird mit vier M3 x 8 Schrauben an der Basis befestigt.
Ein Flachbandkabel ist alles, was benötigt wird, um Strom und Sensordaten zwischen dem Controller und dem Roboter zu übertragen.
Nur Strom- und USB-Anschluss sind erforderlich, damit der Roboter betriebsbereit ist.
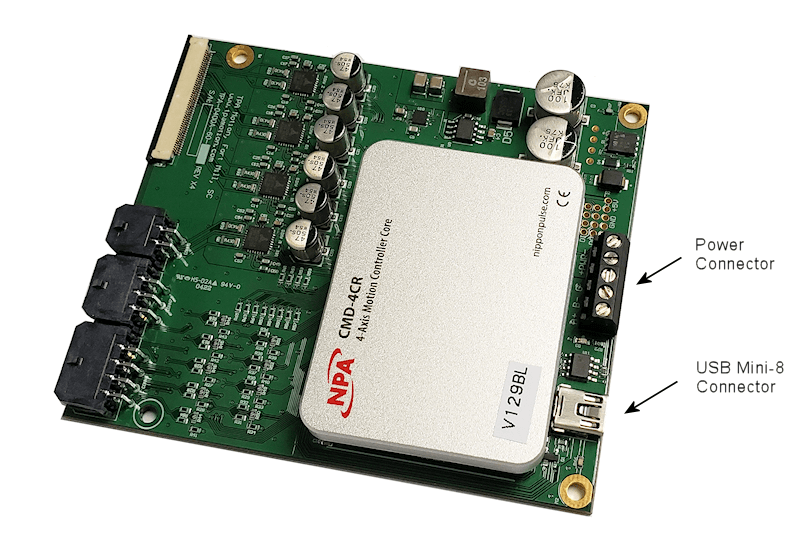
Angaben zum 4-Achsen-Motion-Controller
Bewegungssteuerung:
- Lineare Interpolation (zwei bis vier Achsen)
- Koordinierte Bewegung
- Absolute oder inkrementelle Positionierung
Programmierung:
- BASIC-ähnliche Programmiersprache (A-SCRIPT)
- Kompilieren, Lesen und Schreiben eigenständiger Programme
- Kommunikationsport: USB 2.0 und RS-485
Leistung:
- +24 VDC Eingangsspannung bei 2-3 Ampere
Leiterplattengröße:
100 Länge x 88 Breite x 18 Höhe, Einheiten: mm
Kontaktieren Sie uns, um das Design für OEM-Mikrotiterplattenroboter zu besprechen.
Wir können maßgeschneiderte OEM-Systeme mit hoher Genauigkeit und Präzision für eine Vielzahl von Mikrotiterplatten von 96 bis 1536 Mulden bis hin zu individuellen Plattenkonfigurationen herstellen.
Unten finden Sie eine kurze Liste der Informationen, die wir benötigen, um mit dem Konstruktionsprozess zu beginnen:
Größe des Arbeitsraums, in den der Roboter passen muss
Länge des Verfahrwegs für jede Achse
Anforderungen an den Verfahrsensor
Anforderungen an die Genauigkeit
Art der Nutzlast (z. B. Mikrotiterplatte) und Gewicht