40N vacuum capable, non-magnetic linear actuator
The Acuvi LEGS® LT40 linear piezo actuator is intended for OEM applications with focus on heavy lifting with precise positioning in magnetic, vacuum or normal temperature and pressure (NTP) environments.
Heavy lifter 40N force. Sub-nanometer resolution.
- Vacuum capable
- Non-magnetic
- Resolution down to sub-nanometer
- 40 N force
- Self-locking
- No backlash
True direct linear drive
The drive technology employed is direct, eliminating the need for gears or lead screws to generate linear motion. The motor operates through micro-stepping, dividing a complete waveform-step into sub nanometer-sized increments. Speed ranges from nanometers per second to millimeters per second and can be seamlessly controlled within the entire dynamic range. Additionally, it offers high force output within a compact body, achieving a stall force of 40N and a weight of only 61 grams.
The motor has no backlash and draws no power in the hold position.
Available in three versions: Standard stainless steel for general environments (A), Non-magnetic version (C) and Non-magnetic vacuum version (D).
Each version is offered with M1 or M2 mounting.
Specifications Acuvi LEGS® LT40
|
Type
|
Normal (A) |
Non-magnetic (C) |
Non-magnetic vacuum (D) |
Unit |
|
Maximum stroke
|
67
|
mm
|
||
|
Maximum speed
Driver dependent |
12
|
mm/s
|
||
|
Minimum speed
Driver dependent |
1
|
nm/s
|
||
|
Stall force
|
40
|
N
|
||
|
Holding force
|
>40
|
N
|
||
|
Vacuum
|
No |
Yes
|
|
|
|
Non-magnetic
|
No
|
Yes
|
|
|
|
Operating voltage
|
42-48
|
V
|
||
|
Power consumption
|
20
|
mW/Hz
|
||
|
Mechanical size L x H x D
with guides and encoder |
N/A
|
mm
|
||
|
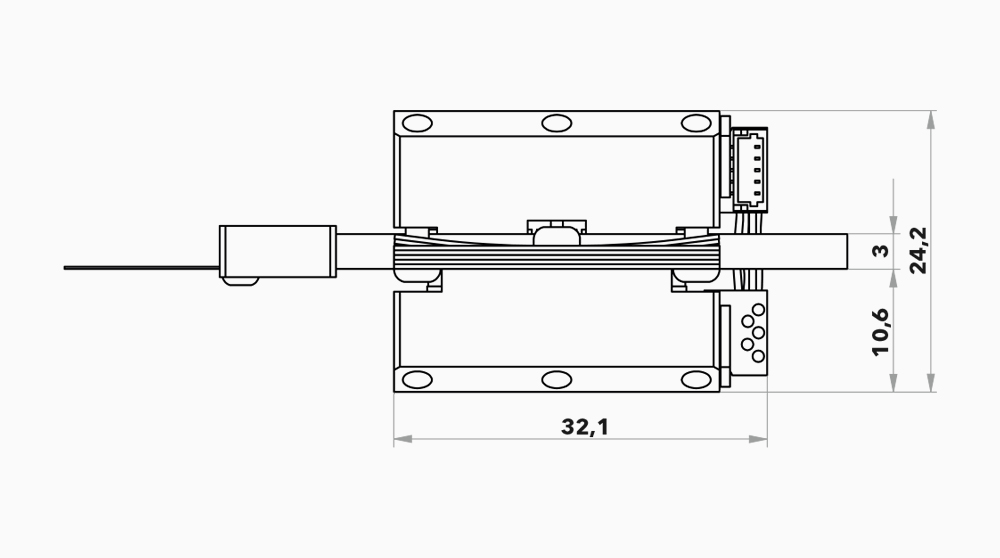
Mechanical size L x H x D
without guides and encoder |
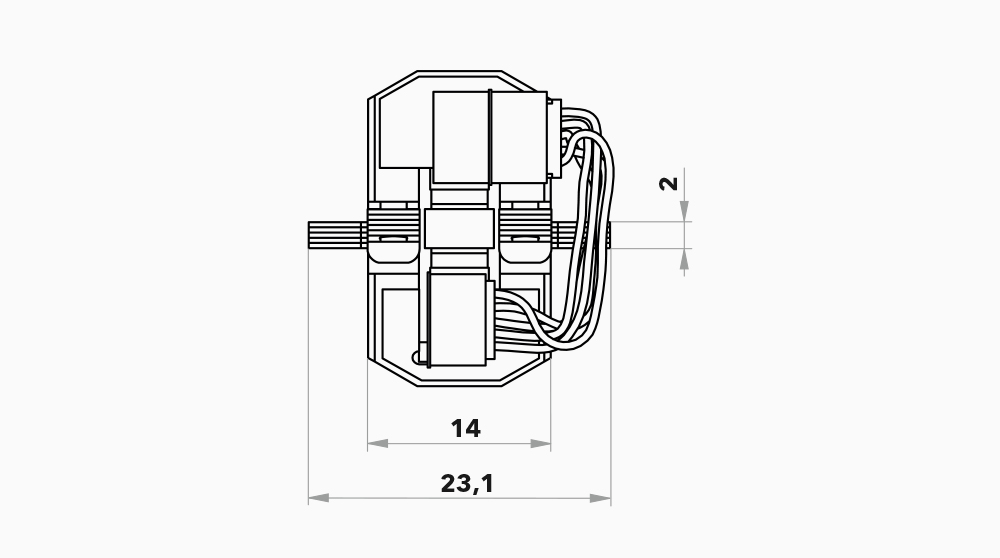
32.1 x 24.2 x 23.1
|
mm
|
||
|
Weight
with 50 mm drive rod |
61
|
gram
|
||
|
Material in motor housing
|
Stainless steel |
Arcap / non-magnetic
|
|
|
|
Operating temperature
recommended |
-20 to +70
|
ºC
|
||
|
Connector motor
|
2 x JST BM05B-SRSS-TB
|
Soldered cable 2 x JST O5SR-3S
|
|
|
|
Connector encoder
|
N/A
|
|
||
|
Resolution motor
|
<1
|
nm
|
||
|
Built in encoder
|
No
|
|
||
|
Encoder resolution
|
N/A
|
nm
|
||
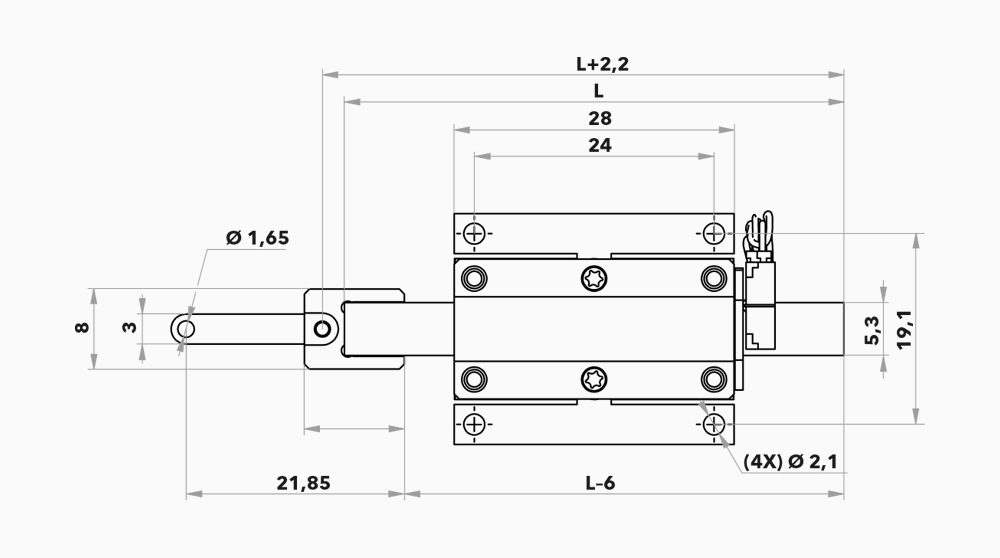
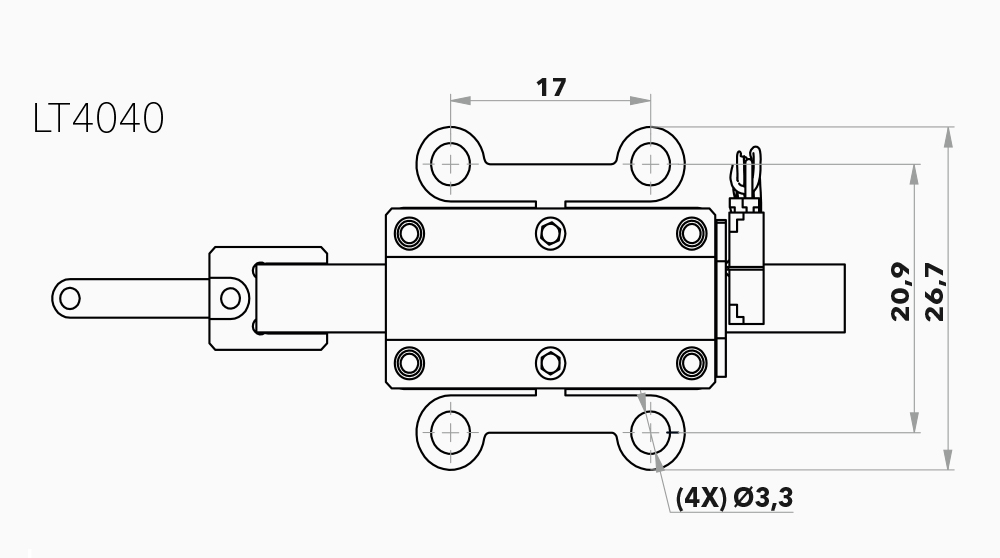
Main dimensions LT40
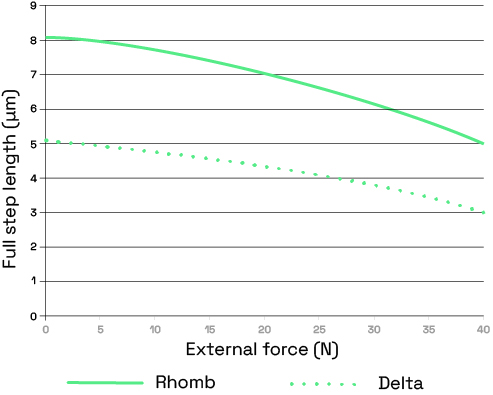
Motor performance LT40
Motor performance with waveform Rhomb (filled) and waveform Delta (dotted). The full step length is the average distance the drive rod moves when the legs take one full step (i.e. for one waveform cycle).
Note: A standard deviation σ of 0.5 μm should be taken into account.
Typical values are given for 20ºC.
Stroke range
|
Stroke (mm) with one adapter
|
Drive rod length (mm)
|
|
0-6 |
40
|
|
0-16 |
50
|
|
0-26 |
60
|
|
0-67 |
100.8
|
Motor speed at 20 ºC
|
Waveform
|
Max feq. (Hz)
|
Speed range (mm/s)
|
|
Delta
|
1500
|
0-8
|
|
Rhomb |
1500
|
0-12
|

Controlling the motor
Our motor control units come in many different versions, with controllers and amplifiers for laboratory use as well as for integration into OEM devices.
We can also license the drivers for customers that want to build their own driver electronics.

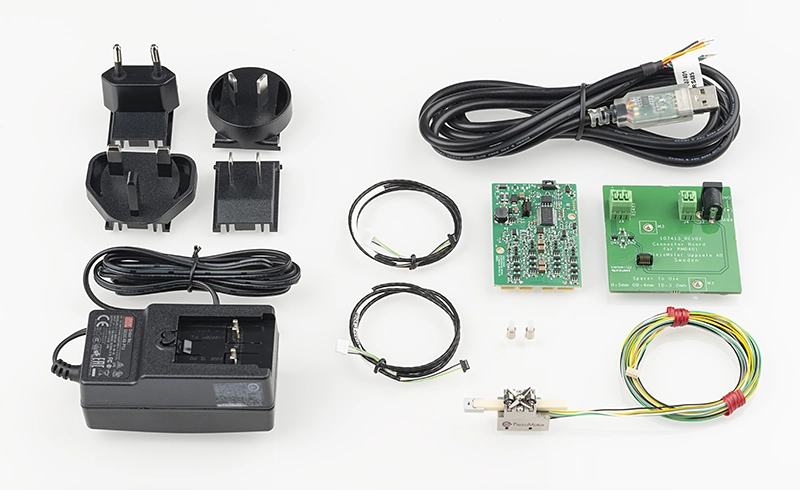
LT40 LEGS® Piezo Motor Starter Kit
Starter kits are available for the LT40 in different configurations. Starter Kits are for evaluation purposes only with a max quantity of 3 kits/customer. You only pay for the motor.
Configure LT40 and get a quote
Get a quote
Get a quote for product name